Rather than engineer a control solution and find that there are issues when operating C3.2B, Shaun Whitehead and his team at Leeds Robotics have taken on the task of working in conjunction with the design team on a phased approach.
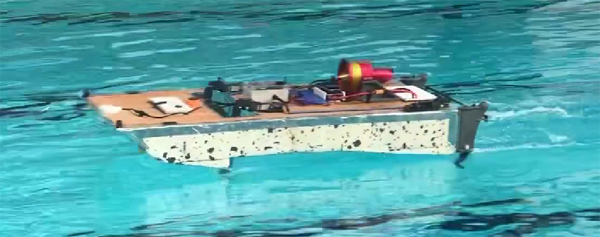
Separation of systems to control the boat from those used to collect data is a sensible step. Keys areas of control are orientation (getting from point A to point B) plus roll, pitch and ride height. Each element of the design was tested in the lab as a first step to ensure that it worked. The complete system was then fitted to the UB (Ugly Boat) which is powered by a ducted fan engine.
Initial tests in an endless pool (the type swimmers to train in) checked things out before it was tested in a much larger indoor pool. That was followed by even more extensive testing at QinetiQ’s Ocean Basin test pool. A variety of individual technical solutions (eg ultrasonic sensors) can now be tested under extreme conditions to find out what the operational limits might be. As Shaun Whitehead describes it – we want it to be a Wobbly Boat as well as an Ugly Boat to test those limits.
All this leads up to a full test program for C3.2B later in 2024 on a Scottish Loch. With the data from that and the CFD data we can carry out a full design analysis to see if we have a Proof of Concept that could be turned into a full sized challenger.

